When is a vehicle counted?
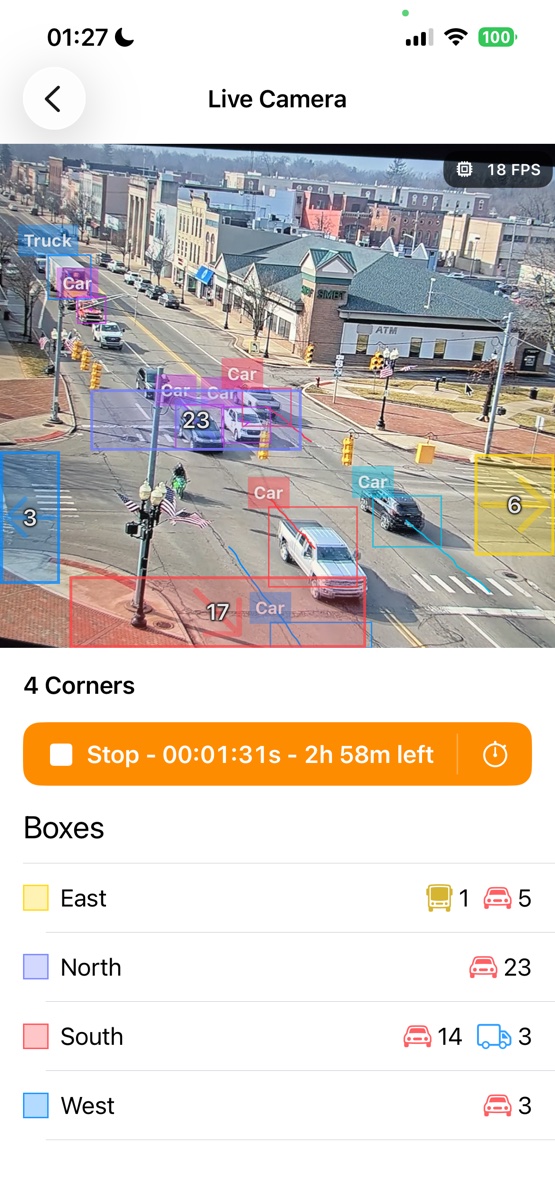
A vehicle is counted when it is successfully detected, which is indicated by a border appearing around it, along with a trailing line that shows its recent movement. This trailing line represents the vehicle's center point over the last few seconds.
For a vehicle to be officially counted, its center point must enter or cross a designated detection box. If only the border of the vehicle makes contact with the box, it won't be counted until the center point (indicated by the trailing line) crosses into the detection box area.